A robotfejlesztés egyik érzékeny pontja: hogyan változtasson helyet a gép? Bár a Boston Dynamics két- és négylábú humanoid és "kutyaoid" robotjai a wow-érzést szinte mindig kiváltják, a robotgyártók többsége mégis marad a jól bevált keréknél: egyszerűbb, olcsóbb, stabilabb – főleg, ha három vagy négy van belőle. Pedig a kerék előtt is tornyosulhatnak leküzdhetetlen akadályok: például a lépcső.
Ám jöttek a dél-koreai tudósok, és ezt is megoldották. Egy többek között robotikával foglalkozó kutatóintézet (Korea Institute of Machinery and Materials – KIMM), kitalált egy kereket, ami akkor a legjobb, amikor nem is kerek. A szerkezet ugyanis valós időben képes változtatni a merevségét, hogy igazodhasson a terepviszonyokhoz. A robot (vagy akár jármű) így sokkal könnyebben tudja leküzdeni a terepi akadályokat (szikla, lépcső stb.), mint merev szerkezetű kerékkel.
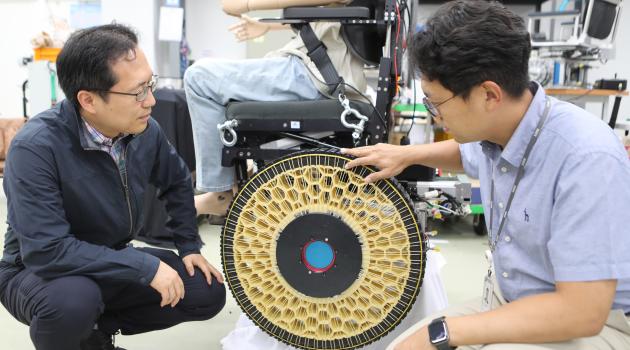
A kerék szerkezetének (a kutatók intelligens láncoltblokk rendszernek, smart chain block systemnek nevezték el) megalkotásához állítólag a felületi feszültség által összetartott folyadékcseppek viselkedése adta az ötletet (alapfokú ismétlés a videóban). A futófelület némileg a kerépárláncra hajaz, kis egységekből áll. A kerék merevsége a középpontjához csatlakozó küllők meghúzásával vagy meglazításával változtatható. Normál módban merev, kör alakú. Akadályokhoz ütközve azonban deformálható állapotba kapcsol: részben idomul az előtte tornyosuló akadályhoz (ahogy a folyadékcsepp is), amin így szinte átkúszik vagy inkább átcsorog (lásd az alábbi videót). A terepviszonyokat-akadályokat szenzorok segítségével érzékeli, és jeleik alapján automatikusan változtatja a merevségét.
Katonáknak és mozgáskorlátozottaknak is
Az intelligens kerék első prototípusait egy kerekesszékbe építették. Az eredmény több mint meggyőző. A kerekek merevségének változtatásával nehéz, egyenetlen terepen is sokkal stabilabbá vált a mozgás, és a székkel akár 18 cm magas lépcsőket is gond nélkül le lehetett küzdeni külső segítség nélkül. A kutatók állítása szerint négykerekű rendszerbe szerelve gond nélkül átjut sugarának 1,3-szorosáig terjedő akadályokon. A sebességre sem lehet panasz, a kísérletek során 30 km/h-nál még stabilan működött a kerékintelligencia.
A csapat szerint találmányuk forradalmasítja a mobilitás számos aspektusát. Amellett, hogy jelentősen növelheti a mozgáskorlátozott emberek szabadságfokát, új lendületet adhat a mobil robotok (pl. a házhoz szállítást végző autonóm konténerek) fejlesztésének. Szintén jól hasznosíthatják a felfedezést szélsőséges környezetekre tervezett speciális járművek (pl. katonai eszközök) építésénél.
(Fotó: Korea Institute of Machinery and Materials)
a melléklet támogatója a ONE Solutions

Projektek O-gyűrűje. Mit tanulhat egy projektvezető a Challenger tragédiájából?