
Bár a kommunikáció kulcsfontosságú dolog bármilyen fajta együttműködés szempontjából, a túlzásba vitt vagy egyoldalú közlések károsan is befolyásolhatják a teljesítményt. Ez különösen igaz az ember-gép interakcióra, amelyeket a Massachusetts Institute of Technology (MIT) kutatói most egy új számítási keretrendszer felállításával próbálnak új szintre emelni, irányítva az ilyen kommunikáció feltételeit, időzítését és tárgyát is.
A CommPlan néven hivatkozott modell az interakcióval összefüggő adatok gyűjtésére egy hibrid megoldást javasol, amelyet egyrészt manuális specifikációra, másrészt az adatokra épülő tanulási folyamatra alapoznának. Ennek alapján a robotok döntéshozatalát meghatározó számítások nem csak az interakció során alakulnak, de részben a másik oldalon álló emberek mentális állapotának megfigyelésére épülnek.
A március legvégén közzétett anyagban a CommPlan implementációját egy megosztott munkahelyi feadaton keresztül mutatják be, amelynek során a robotnak többféle kommunikációs lehetőség is a rendelkezésére áll, és döntéseit nagyon rövid idő alatt kell indokolnia. Az emberi tesztalanyokkal végzett kísérletek során a CommPlan állítólag a lehetőségek hatékony kihasználását, ezen keresztül pedig a kollaboráció javulását eredményezte.
A feladatot sem szabad szem elől téveszteni
A folyamat meghatározó eleme a csapatmunkára támaszkodó megközelítés, vagyis a résztvevők egymást támogatják a feladatok elvégzésében. A rendszer a gépi tanulás (machine learning, ML) megerősítéses tanulás (reinforcement learning, RL) nevű módszerét alkalmazza, ami tulajdonképpen kísérletek útján keresi és tanulja meg a legjobb gyakorlatokat. Erről nemrégiben egy olyan tesztkörnyezetet kapcsán írtunk, ami az összetett manipulációs feladatok hatékonyságának mérésére és felgyorsítására szolgál, de a Google DeepMind részlege is ilyen megoldást használt az emberi sakkozókat és gójátékosokat túlhaladó MI fejlesztésében.
A nyilvánvaló különbséget itt a robotok verbális megnyilatkozásainak lehetőségei adják, amennyiben a kísérletekben szereplő robotkart irányító számítógép hangszórókon keresztül, egy kereskedelmi forgalomban elérhető text-to-speech program segítségével tud beszélni az emberekhez. Képes ezen keresztül megkérdőjelezni a döntéseket, vagy ő maga is megkérheti valamire a humán partnereket.
A leírásban egy közösen használt konyhai munkaasztal szerepel, ahol értelemszerűen össze kell hangolni a feladatokat, mivel a szendvicseket készítő ember és a gyümölcslevet töltögető robotkar ugyanazt a teret használja. Itt a hatékonyság feltétele a folyamatos egyeztetés, ha nem akarnak rendszeresen összeütközni, a csapat teljesítményét a RL jutalmazási rendszere alapján értékelik.
Ez a robot programozásának szempontjából azt jelenti, hogy a gép a saját műveleteit illetően maximális hatékonyságra törekszik annak függvényében, hogy a vele szemben álló ember milyen döntéseket hoz, vagyis figyelembe kell vennie a vele való interakciót. A kutatók szerint eddig nem állt elő senki olyan modellel, amely többféle (akár verbális) kommunikációs csatorna felhasználására építette a döntéshozatalt, miközben tekintettel volt a partner viselkedésére és közvetett szándékaira is. A kutatások ugyanis jellemzően úgy fókuszálnak az ember-robot kommunikációra, hogy magát az elvégzendő feladatot kihagyják az egyenletből.
Kimondatlan célok és összetett utasítások
Az egész elképzelés természetesen felveti azt a kérdést is, hogy az ilyen együttműködéek során ki lenne a főnök, hiszen egy közösen végzett művelet még egyenrangú felek részvételével is akkor lesz hatékony, ha egyikük aktulisan vezető szerepet kap. Éppen ezért fontos az alá- és fölérendeltség határainak pontos meghatározása, tekintettel az olyan jelenségekre is, mint például hogy a határozott elképzeléssel rendelkező emberek hajlamosak megtagadni a gép kéréseit, míg az éppen tanácstalanok nagyon is szívesen támaszkodnak az MI inputjára.
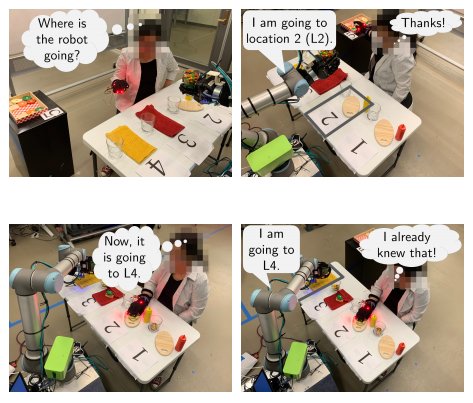
Kimondatlan kérdések: példa a hatékony és a kevésbé hatékony kommunikációra
forrás: interactive.mit.edu
A rendszer hangolásában így nagy jelentőséget kap, hogy bizonyos fokig érzékelni kell az emberi partnerek igényeit, erre pedig a CommPlan részben már képes is, és a tanuló komponensen keresztül egyre jobb lehet benne. A lényeg mindenesetre az, hogy ha az ember megtagadja a robot kérését, akkor az újratervezi az akcióit annak érdekében, hogy adaptálódjon az új helyzethez. Mivel az semmiképpen sem cél, hogy az emberek úgy érezzék, egy gép akar nekik dirigálni, a kutatók hangsúlyt helyeznek az ember világosan ki nem fejezett, mégis meglévő szándékainak érzékelésére.
Az MIT-nél mindebben nagy lehetőségeket látnak az olyan területeken, mint mondjuk az összetett instrukciók feldolgozása, szemben a felügyelt tanulási technikákra (supervised learning) jellmző egyszerű utasításokkal. A mai robotok hiába automatizáltak, a szabadságuk foka meglehetősen alacsony, és általában a legegyszerűbb, ismétlődő rutinok végrehajtására alkalmasak. Az egyre szofisztikáltabb gépekkel azonban az egyre összetettebb kommunikációra is szükség lesz, és a kutatók szerint nem árt, ha a csapatmunka és az együttműködés kereteit már azok megjelenése előtt lefektetjük.
A kutatásról részleteiért az MIT publikációjában vagy a ZDnet riportjában is érdemes körülnézni.
Öt kérdés, amelyet érdemes feltenni felhőplatform-választás előtt
Egy felhőplatform értékét nemcsak a szolgáltatásai határozzák meg, hanem az is, hogy egy kritikus helyzetben mennyire képes támogatni a vállalat működését.
a melléklet támogatója a ONE Solutions

Projektek O-gyűrűje. Mit tanulhat egy projektvezető a Challenger tragédiájából?