

Klinikai körülmények között tesztelik egy bostoni kórhában azt a sebészeti robotot, amely sokkal pontosabban dolgozik, mint a legjobb kezű sebész. Az eszközt Worcester Polytechnic Institute és a Johns Hopkins Egyetem kutató fejlesztették ki. Egyelőre csak prosztatadaganatok vizsgálatához használják, de távlatilag komolyabb, akár agysebészeti beavatkozásoknál is bevethető lehet.
Az elv egyszerű: a beteget betolják az MRI készülékbe, amely valós időben készített felvételei alapján vezérli a berendezést, amely így sokkal pontosabban tud mintát venni a vizsgálandó szervből, mintha azt az orvos akár csak ultrahangos segítséggel is kézzel csinálná.
Amit meg kellett oldani
A hagyományos biopszia során az orvos gyakorlatilag vakon dogozik. Több ponton vesz mintát, és azt kiértékelve állapítja meg, hogy van-e a szervben kóros elváltozás. A mintavételt ugyan segítheti egy ultrahanggal, de az nem nyújt elég tiszta képet, így továbbra is több mintát kell vennie. Minden szúrás fertőzésveszélyt hordoz magában, ezért sokat segít, ha célzottan, egy szúrással ki lehetne emelni azt a szövetmintát a szerv gyanús területéről. Ehhez kézenfekvő megoldásnak kínálkozott a képvezérelt robottal történő mintavétel.
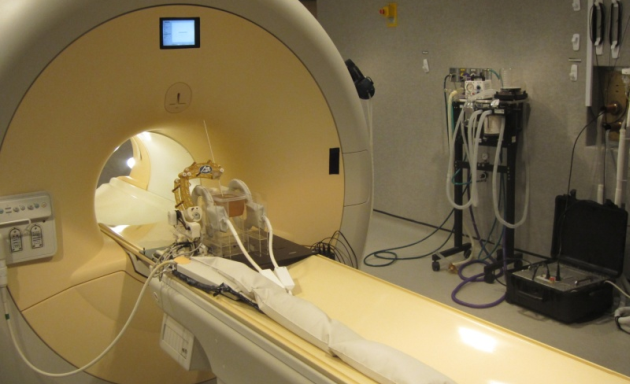
Az MRI mellett jobbra lent a hotdozható vezérlő egység
Csakhogy mielőtt a robotvezérlésig eljutottak volna a kutatók, meg kellett oldani egy nagyon fontos problémát. A sebészeti eszközök, valamint a vezérlőmotorok fémet tartalmaznak. Az MRI-ben azonban erős mágneses tér van, amit a fémeszközök zavarnak, de a mágnese tér a sebészeti eszköz vezérlését is befolyásolhatja. Egyszerűbb dolguk volt a biopsziához használatos fém tűk kiváltásával: ezeket speciális műanyagból készül tűkkel pótolták.
Orvosi robotba boltban kapható piezoelektromos motort
A vezérlőmotorok már komolyabb kihívás elé állították a fejlesztést irányító Gregory Fischer professzor csapatát.
A kutatók kezdetben pneumatikus vezérléssel próbálkoztak. Az olyan finom mozgásokat azonban, melyek egy biopszia elvégzéséhez vagy bonyolultabb sebészeti tevékenység végrehajtásához kellenek, nagyon nehéz így megoldani. Ezért a kereskedelmi forgalomban is kapható piezoelektromos motorokat használtak. Ezzel egy csapásra két problémát is megoldottak: kiküszöbölték, illetve elfogadható szintre csökkentették az MRI-ben fellépő interferenciát, és olcsóbbá tették a berendezést.
A vezérlőelektronika elfér egy hordozható táskában. Az összeköttetést az MRI belsejében dolgozó robottal pedig optikai kábel biztosítja.
A kutatók dolgoznak olyan agysebészeti eszközön is, amely ugyanezzel a képvezérlési módszerrel képes az agy olyan területein is kiégetni a daganatos területeket, ahová a hagyományos kézi sebészeti eszközökkel szinte lehetetlen hozzáférni. A jelenleg is használt sebészeti roboteszközöket még a sebészek közvetlenül irányítják. De nem kell már sokat várni az olyan robotokra, amelyeket a képalkotó MRI automatikusan tud vezérelni.
A Gregory Fischer vezette kutatócsoporthoz hasonló megoldásokon mások is dolgoznak. A Nemzetközi Űrállomásra robotkarokat szállító MDA Corporation például már 2008 óta kísérletezik képvezérelt robotok alkalmazásával különböző műtéti területeken, többek között az agysebészetben is. Az alábbi videó jól mutatja, hogy már ma is mire képesek az operáló robotok. A gyengébb idegzetűek kedvéért olyan videót választottunk, amelyen egy sebészeti robot gyümölcsön demonstrálja képességeit.
A hibakeresés nem egyenlő az alkalmazásbiztonsággal
Építsünk olyan AppSec környezetet, amely csökkenti az alkalmazásfejlesztés kockázatait, de nem válik a gyors leszállítás akadályává!
a melléklet támogatója a Clico

CIO kutatás
Merre tart a vállalati IT és annak irányítója?
Hiánypótló nagykép a hazai nagyvállalati informatikáról és az IT-vezetőkről: skillek, felelősségek, feladatkörök a múltban, a jelenben és a jövőben.
Töltse ki Ön is, hogy tisztábban lássa, hogyan építse vállalata IT-ját és saját karrierjét!
Az eredményeket május 8-án ismertetjük a 17. CIO Hungary konferencián.
Projektek O-gyűrűje. Mit tanulhat egy projektvezető a Challenger tragédiájából?